| |
1) Transformation zwischen globalen Koordinatensystemen: Übergang von einem ersten erdfesten globalen Koordinatensystem (Startsystem) zu einem zweiten (Zielsystem). Start- bzw. Zielsystem können entweder ein globales geozentrisches Koordinatensystem oder ein konventionelles geodätisches Koordinatensystem sein. Im allgemeinen unterscheiden sich die Koordinatensysteme in ihren Ursprüngen, den Orientierungen ihrer Koordinatenachsen und ihren Massstäben. Man spricht deshalb auch von einer Ähnlichkeitstransformation. Zur mathematischen Darstellung einer Koordinatentransformation zwischen dreidimensionalen rechtwinklig kartesischen Koordinaten verwendet man Translationen entlang dreier Raumrichtungen durch Translationsvektoren und Drehungen um drei Drehachsen durch Drehmatrizen. Ein skalarer Faktor berücksichtigt die unterschiedlichen Massstäbe. Im allgemeinen kann man davon ausgehen, dass alle Transformationsparameter klein sind. Eine Transformation zwischen Koordinatensystemen mit unterschiedlichem Orientierungssinn erfordert zusätzlich eine Spiegelung, die durch Spiegelungsmatrizen vollzogen werden kann. Zur Formulierung eines speziellen Transformationsmodells ist es notwendig, den Drehpunkt und die Drehachsen zu definieren, wobei sich die Drehachsen im Drehpunkt schneiden.
Als Startsystem sei das Koordinatensystem SK betrachtet und als Zielsystem das Koordinatensystem SG. Mit den Grössen 
=Ortsvektor des zu transformierenden Punktes im System SG,

=Ortsvektor des zu transformierenden Punktes im System SK,

0=Ortsvektor des Drehpunktes im System SK,
 =Translationsvektor der Ursprünge beider Systeme SG→SK, M=(1+m)=Massstabsfaktor, D=Drehmatrix, die sich aus drei infinitesimalen Drehungen um vorgegebene Drehachsen zusammensetzt, lautet die allgemeine Transformationsformel (Abb. 1): =Translationsvektor der Ursprünge beider Systeme SG→SK, M=(1+m)=Massstabsfaktor, D=Drehmatrix, die sich aus drei infinitesimalen Drehungen um vorgegebene Drehachsen zusammensetzt, lautet die allgemeine Transformationsformel (Abb. 1):
 Beispielsweise können folgende Vereinbarungen getroffen werden: Drehpunkt Beispielsweise können folgende Vereinbarungen getroffen werden: Drehpunkt 
0 ist der Ursprung des Systems SK: 0=0,
 Drehung D: Drehung D:
DB(�x,�y,�z):=D3(�z)D2(�y)D1(�x).
Als Transformationsformel erhält man:
 Dieses häufig verwendete Transformationsmodell wird auch als Bursa-Wolf-Modell bezeichnet. Ein weiteres Transformationsmodell erhält man mit den Vereinbarungen (Molodensky-Badekas-Modell): Drehpunkt Dieses häufig verwendete Transformationsmodell wird auch als Bursa-Wolf-Modell bezeichnet. Ein weiteres Transformationsmodell erhält man mit den Vereinbarungen (Molodensky-Badekas-Modell): Drehpunkt 
0 ist der Fundamentalpunkt der Triangulation im System SK , Drehung D:
DB(�x,�y,�z):=D3(�z)D2(�y)D1(�x).
Die Drehmatrix entspricht der des Bursa-Wolf-Modells. Die Transformationsformel ergibt sich zu:
 Ein weiteres Transformationsmodell verwendet die Koordinatenachsen des topozentrischen geodätischen Systems. Damit gelten folgende Vereinbarungen (Veis-Modell): Drehpunkt Ein weiteres Transformationsmodell verwendet die Koordinatenachsen des topozentrischen geodätischen Systems. Damit gelten folgende Vereinbarungen (Veis-Modell): Drehpunkt 
0 ist der Fundamentalpunkt der Triangulation im System SK, Drehung D: Drehung um die Achsen des topozentrischen geodätischen Systems. Zur Realisierung muss zuerst in dieses System gedreht werden, dann erfolgen die Drehungen um die kleinen Drehwinkel η, ξ und ψ (astrogeodätische
Lotabweichungen), anschliessend erfolgt die Rückdrehung:
Dv:=D3(-L0)D2(B0-90º)D1(-η)D2(-ξ)D3(ψ)D2(90-B0)D3(L0)
und die Transformationsformel lautet:
 Die Transformationsparameter werden mit Hilfe einer räumlichen Helmert-Transformation aus den Koordinaten identischer Punkte berechnet. 2) Transformation zwischen globalen und lokalen Koordinatensystemen: Übergang von einem erdfesten globalen Koordinatensystem (Startsystem) zu einem erdfesten lokalen Koordinatensystem (Zielsystem) oder umgekehrt. Start- bzw. Zielsystem können entweder ein globales geozentrisches Koordinatensystem bzw. ein topozentrisches astronomisches Koordinatensystem oder ein konventionelles geodätisches Koordinatensystem bzw. ein lokales ellipsoidisches Koordinatensystem sein. Die Transformationsformeln zwischen dem globalen geozentrischen Koordinatensystem und einem topozentrischen astronomischen Koordinatensystem sind grundlegend für die Modellbildung der Dreidimensionalen Geodäsie. Die Transformation beinhaltet zwei Drehungen, nämlich um die astronomischen Koordinaten λ und φ, die die z-Achse des lokalen Systems bezüglich des globalen Systems festlegen, sowie eine anschliessende Spiegelung (Spiegelungsmatrix): Die Transformationsparameter werden mit Hilfe einer räumlichen Helmert-Transformation aus den Koordinaten identischer Punkte berechnet. 2) Transformation zwischen globalen und lokalen Koordinatensystemen: Übergang von einem erdfesten globalen Koordinatensystem (Startsystem) zu einem erdfesten lokalen Koordinatensystem (Zielsystem) oder umgekehrt. Start- bzw. Zielsystem können entweder ein globales geozentrisches Koordinatensystem bzw. ein topozentrisches astronomisches Koordinatensystem oder ein konventionelles geodätisches Koordinatensystem bzw. ein lokales ellipsoidisches Koordinatensystem sein. Die Transformationsformeln zwischen dem globalen geozentrischen Koordinatensystem und einem topozentrischen astronomischen Koordinatensystem sind grundlegend für die Modellbildung der Dreidimensionalen Geodäsie. Die Transformation beinhaltet zwei Drehungen, nämlich um die astronomischen Koordinaten λ und φ, die die z-Achse des lokalen Systems bezüglich des globalen Systems festlegen, sowie eine anschliessende Spiegelung (Spiegelungsmatrix):
 Die Transformationsgleichung für die Transformation der Koordinatendifferenzen bzgl. der beiden Systeme lautet: Die Transformationsgleichung für die Transformation der Koordinatendifferenzen bzgl. der beiden Systeme lautet:
 Setzt man die sphärischen Polarkoordinaten im lokalen astronomischen System ein, so erhält man eine Verknüpfung terrestrischer Beobachtungen d,a,z mit Koordinatendifferenzen, bezogen auf das globale geozentrische Koordinatensystem: Entsprechende Transformationsgleichungen ergeben sich für den Übergang zwischen einem konventionellen geodätischen Koordinatensystem und einem lokalen ellipsoidischen Koordinatensystem. Setzt man die sphärischen Polarkoordinaten im lokalen astronomischen System ein, so erhält man eine Verknüpfung terrestrischer Beobachtungen d,a,z mit Koordinatendifferenzen, bezogen auf das globale geozentrische Koordinatensystem: Entsprechende Transformationsgleichungen ergeben sich für den Übergang zwischen einem konventionellen geodätischen Koordinatensystem und einem lokalen ellipsoidischen Koordinatensystem.
 3) Transformation zwischen lokalen Koordinatensystemen: Übergang von einem ersten erdfesten lokalen Koordinatensystem (Startsystem) zu einem zweiten (Zielsystem). Start- bzw. Zielsystem können entweder ein topozentrisches astronomisches Koordinatensystem ( 3) Transformation zwischen lokalen Koordinatensystemen: Übergang von einem ersten erdfesten lokalen Koordinatensystem (Startsystem) zu einem zweiten (Zielsystem). Start- bzw. Zielsystem können entweder ein topozentrisches astronomisches Koordinatensystem ( 
,

,

) oder ein lokales ellipsoidisches Koordinatensystem ( 
,

,

) sein. Nimmt man die Ursprünge beider Koordinatensysteme in einem Punkt P im Bereich der Erdoberfläche an, dann unterscheiden sie sich lediglich um kleine Klaffungswinkel, wenn die entsprechenden Koordinatenflächen und dazu rechtwinkligen Koordinatenlinien die Äquipotentialflächen und Lotlinien des Schwerefeldes annähern. Die beiden infinitesimalen Winkel ξ und η um die lokale y- und x-Achse des lokalen ellipsoidischen Koordinatensystem können als Abweichungen eines Lotes von einer Ellipsoidnormalen im Punkt P interpretiert werden. Sie werden astrogeodätische Lotabweichungen genannt. Der infinitesimale Winkel ψ um die z-Achse des lokalen ellipsoidischen Koordinatensystem wird als Lotabweichungskomponente in der Horizontebene (azimutale Komponente) bezeichnet. Die Lotabweichungskomponenten und die azimutale Komponente können in Abhängigkeit von den Klaffungswinkeln �x,�y,�z zwischen den beiden globalen Koordinatensystemen (globales ) bzw. konventionelles geodätisches Koordinatensystem (
 Ostkomponente der Lotabweichung (Lotabweichungskomponente in Länge): Ostkomponente der Lotabweichung (Lotabweichungskomponente in Länge):
η=(λ-L)cosB-(�xcosL+�ysinL)sinB+�zcosB,
Nordkomponente der Lotabweichung (Lotabweichungskomponente in Breite):
ξ=(φ-B)+�xsinL-�ycosL,
azimutale Lotabweichungskomponente:
ψ=(λ-L)sinB+(�xcosL+�ysinL)cosB+�zsinB.
Damit sind die Differenzen der Azimute und Zenitdistanzen im topozentrischen astronomischen Koordinatensystem ( 
,

,

) und im lokalen ellipsoidischen Koordinatensystem ( 
,

,

) festgelegt. Für die Differenz zwischen astronomischem und ellipsoidischem Azimut gilt:
a-α=
(λ-L)sinB+cotξ[(φ-B)sinα-(λ-L)cosBcosα]+
(�xcosL+�ysinL)cosB+�zsinB+ cotξ[�x(cosLsinBcosα+sinLsinα)+
�y(sinLsinBcosα-cosLsinα)�zcosBcosα]
sowie für die Differenz zwischen Zenitdistanz und ellipsoidischer Zenitdistanz: z-ζ=-[(φ-B)cosα+(λ-L)cosBsinα]+
�x(cosLsinBsinα-sinLcosα)+
�y(sinLsinBsinα+cosLcosα)�zcosBsinα.
Aus theoretischen und praktischen Gründen wird bei der Lagerung und Orientierung geodätischer
Netze die Parallelität der globalen erdfesten Koordinatensysteme angestrebt, so dass die Drehwinkel
(�x,�y,�z) in den meisten Fällen zu Null angenommen werden können.
4) Transformation zwischen natürlichen und ellipsoidischen Koordinaten: Übergang von dem im
Schwerefeld der Erde definierten System natürlicher Koordinaten (φ,λ,W) in das System
ellipsoidischer Koordinaten (B,L,h). Die Transformation erfordert die Kenntnis der infinitesimalen
Drehwinkel (�1,�2,�3) zwischen den beiden globalen Koordinatensystemen (globales geozentrisches Koordinatensystem ( 
,

,

) bzw. konventionelles geodätisches Koordinatensystem ( 
,

,

) sowie die Komponenten der astrogeodätischen Lotabweichung ξ und η und die Lotabweichungskomponente in der Horizontebene ψ. Die ellipsoidischen Koordinaten B und L ergeben sich dann aus den Formeln:
B=φ-ξ+�xsinL-�ycosL,
 bzw. unter der Voraussetzung paralleler Achsen der globalen Koordinatensysteme: B=φ-ξ, bzw. unter der Voraussetzung paralleler Achsen der globalen Koordinatensysteme: B=φ-ξ,
 Die natürlichen Koordinaten eines Punktes P umfassen neben den Richtungskomponenten der Zenitrichtung noch den Wert des Schwerepotentials W der Äquipotentialfläche durch diesen Punkt. Er entspricht der geopotentiellen Kote C nach einer entsprechenden Festlegung des Vertikaldatums und beschreibt die Höhenlage des Punktes (Höhensystem). Die geopotentiellen Koten können mit Hilfe des geodätischen Nivellements bestimmt werden. Um ein Längenmass zu erhalten, kann (theoretisch gleichwertig) die Länge der Lotlinie, gemessen von einer Bezugsfläche (Geoid), angegeben werden. Die natürlichen Koordinaten eines Punktes P umfassen neben den Richtungskomponenten der Zenitrichtung noch den Wert des Schwerepotentials W der Äquipotentialfläche durch diesen Punkt. Er entspricht der geopotentiellen Kote C nach einer entsprechenden Festlegung des Vertikaldatums und beschreibt die Höhenlage des Punktes (Höhensystem). Die geopotentiellen Koten können mit Hilfe des geodätischen Nivellements bestimmt werden. Um ein Längenmass zu erhalten, kann (theoretisch gleichwertig) die Länge der Lotlinie, gemessen von einer Bezugsfläche (Geoid), angegeben werden.
Dieses Höhenmass ist die orthometrische Höhe H des Punktes. Die Höhenlage des Punktes P,
bezogen auf ein konventionelles geodätisches Koordinatensystem mit einem Rotationsellipsoid als
Referenzfläche ist die ellipsoidische Höhe h des Punktes P. Geoid und Ellipsoid weichen um die
Geoidhöhe N voneinander ab, so dass gilt: h=H+N.
5)Transformation zwischen raumfesten und erdfesten Bezugsrahmen: Übergang von einem
vereinbarten raumfesten Bezugsrahmen (CCRF) zu einem vereinbarten erdfesten Bezugsrahmen
(CTRF) oder umgekehrt. Ein konsistentes System von Bezugsrahmen, raumfesten und
erdgebundenen, wie z.B. die Bezugsrahmen ITRF und ICRF des internationalen Erdrotationsdienstes
IERS, enthält auch die Parameter, um die Transformation zwischen den Bezugsrahmen in
konsistenter Weise durchzuführen. Die Transformationen für spezielle, mit einer Jahreszahl
versehene Bezugsrahmen entsprechen den folgenden Schritten, wenngleich sich gewisse
Abweichungen der numerischen Werte ergeben können. Die Transformation vom CCRF ins CTRF
könnte im Prinzip mittels dreier (zeitabhänger) Winkel erfolgen, beispielsweise mit Hilfe der
Eulerschen Winkel (Eulersche Drehmatrix) oder der kardanischen Winkel (kardanische Drehmatrix).
Abweichend davon wird die räumliche Drehung in der Astronomie und Geodäsie
vereinbarungsgemäss aus verschiedenen Gründen in eine Folge davon abweichender
Transformationsschritte zerlegt, die aber wiederum aus Elementardrehungen zusammengesetzt sind. Grundsätzlich handelt es sich beim Übergang zwischen den beiden Bezugsrahmen um zwei
Transformationsschritte:
a) Transformation vom mittleren raumfesten Bezugsrahmen (mean celestial reference frame) der Epoche T0=J2000 in den wahren raumfesten Bezugsrahmen (true celestial reference frame) zur
Epoche T; die Transformation beinhaltet die Drehungen zufolge Präzession und Nutation:
Transformation vom mittleren raumfesten Bezugsrahmen der Epoche T0=J2000,0 (CCRFT0) in den
mittleren raumfesten Bezugsrahmen T (CCRFT): Präzession (precession),
Transformation vom mittleren raumfesten Bezugsrahmen der Epoche T (CCRFT) in den wahren raumfesten Bezugsrahmen zur selben Epoche T (true celestial reference frame, CRFT): Nutation (nutation),
b) Transformation vom wahren raumfesten Bezugsrahmen der Epoche T in den erdfesten
Bezugsrahmen der Epoche T; die Transformation beinhaltet die Drehungen zufolge der tägliche
Rotation der Erde und der Polbewegung: Transformation vom wahren raumfesten Bezugsrahmen der Epoche T (true celestial reference frame,
CRFT) in den wahren erdfesten Bezugsrahmen T (true terrestrial reference frame, TRFT): tägliche
Drehung (daily rotation), Transformation vom wahren erdfesten Bezugsrahmen der Epoche T (TRFT) in den vereinbarten erdfesten Bezugsrahmen derselben Epoche T (CTRFT): Polbewegung (polar motion).
Die Transformation der rechtwinklig-kartesischen Koordinaten bzgl. des mittleren raumfesten
Bezugsrahmens der Epoche T0=2000,0 (CCRFT0) in Koordinaten des vereinbarten erdfesten Bezugsrahmens der Epoche T (CTRFT) gelingt durch die Folge von Drehungen, ausgedrückt in Form
von Drehmatrizen:
 Die erste Transformation P beschreibt die allgemeine (lunisolare und planetare) Präzession für den Die erste Transformation P beschreibt die allgemeine (lunisolare und planetare) Präzession für den
Zeitraum zwischen den Epochen T0=2000,0 und T. Sie setzt sich aus drei Einzeldrehungen
zusammen:
P(-ζA,θA,-zA):=D3(-zA)D2(θA)D3(-ζA). Die äquatorialen Präzessionsparameter lauten: ζA=2306,‘‘2181t+0,‘‘30188t2+0,‘‘017988t3,
θA=2004,‘‘3109t-0,‘‘42665t2-0,‘‘041833t3,
zA=2306,‘‘2181t+1,‘‘09468t2+0,‘‘018203t3,
wobei die Zeitdifferenz t in Julianischen Jahrhunderten der baryzentrischen dynamischen Zeit TDB
(Barycentric Dynamical Time, TDB) einzusetzen ist: t=(T-J2000,0)/36525,0
und T in Julianischen Jahren der baryzentrischen dynamischen Zeit TDB zu nehmen ist. Diese
Parameter entstammen einem numerischen Modell, das von der IAU im Jahre 1976 verbindlich
angenommen worden war. In der Zwischenzeit sind genauere Werte bekannt. Die vereinbarten
Parameter werden jedoch noch beibehalten, um die Gültigkeit und Konsistenz der Systeme über
einen angemessenen Zeitraum zu gewährleisten. Die zweite Drehung N beschreibt die astronomische Nutation zur Epoche T. Sie setzt sich ebenfalls
aus drei Einzeldrehungen zusammen:
N(�,-Δψ,-�-Δ�):=D1(-�-Δ�)D3(-Δψ)D1(�). Die Drehungen enthalten die mittlere Schiefe der Ekliptik � und die astronomischen
Nutationskomponenten in Länge Δψ sowie in Schiefe Δ�. Diese Parameter basieren auf einem
numerischen Modell von Wahr, das 1980 von der IAU als verbindlich angenommen worden war. Die
mittlere Schiefe der Ekliptik zur Epoche T, �, die den Winkel zwischen dem mittleren Ekliptiksystem
und dem mittleren Äquatorsystem repräsentiert, kann aus der folgenden Formel berechnet werden: �=23º26‘21‘‘,448-46‘‘,8150t-0,‘‘00059t2+0,‘‘001813t3.
Die wahre Ekliptikschiefe zur Epoche T ergibt sich aus der Summe �+Δ�. Die astronomischen Nutationskomponenten in Länge Δψ und in Schiefe Δ� können aus Reihenentwicklungen entnommen
werden. Die ersten Terme lauten:
Δψ=(-17‘‘,1996-0,‘‘01742t)sinΩ+
+(0,‘‘2062+0,‘‘00002t)sin(2Ω)+...
Δ�=(9,‘‘2025+0,‘‘00089t)cosΩ+ +(-0,‘‘0895+0,‘‘00005t)cos(2Ω)+...
Die vollständigen Reihenentwicklungen sind beispielsweise in den IERS-Conventions gegeben wie auch verbesserte Theorien für Präzession und Nutation. Die Drehmatrix S beschreibt die tägliche Drehung, ausgedrückt durch die scheinbare Sternzeit des Meridians von Greenwich (Greenwich Apparent Siderial Time, GAST) und zwei Drehungen zufolge der Polbewegung, ausgedrückt durch die Polkoordinaten (xp,yp):
S(GAST,-yp,-xp):=D2(-xp)D1(-yp)D3(GAST).
Das wahre raumfeste Bezugssystem (CRFTT) ist durch den wahren raumfesten Äquator (true
celestial equator) und durch den wahren raumfesten Ephemeridenpol (true Celestial Ephemeris Pole,
CEP) zur Epoche T definiert. Das vereinbarte erdfeste Bezugssystem (CTRFT) ist durch den
vereinbarten mittleren erdfesten Äquator (conventional mean terrestrial equator) und den
vereinbarten erdfesten Pol (Conventional Terrestrial Pole, CTP) zur selben Epoche T definiert. Die
Lage des CEP bzgl. dem CTP ist durch die Parameter der Polbewegung (Polkoordinaten (xp,yp)) beschrieben. Der Winkel zwischen der x-Achse des CRFT (Richtung des wahren Frühlingspunktes
zur Epoche T) und der x-Achse des CTRFT (die in der mittleren astronomischen Meridianebene von
Greenwich liegt) ist durch den Stundenwinkel des wahren Frühlingspunktes von Greenwich, der
scheinbaren Sternzeit des Meridians von Greenwich (GAST), definiert. Die scheinbare Sternzeit
Greenwich GAST unterliegt einer ständigen i.a. ungleichförmigen Veränderung wegen der Rotation
der Erde. Sie kann aus der mittleren Sternzeit Greenwich (Greenwich Mean Siderial Time, GMST)
berechnet werden. Die mittlere Sternzeit Greenwich GMST selbst erhält man aus einem zeitlichen
Polynomansatz, der aus der Differenz der aus Beobachtungen erhaltenen Weltzeit UT1 (Universal
Time 1) und der Atomzeit UTC (Universal Time Coordinated) abgeleitet wird: Δt=UTC-UT1.
Die Integration von Δt über einen Tag ergibt die Veränderungen der Tageslänge (Length Of the Day,
LOD). Die Zeitdifferenz Δt kann nicht in Form einer analytischen Funktion angegeben werden. Sie muss zusammen mit den Polkoordinaten (XP,YP) durch Beobachtung erfasst werden und kann erst im
nachhinein bekannt gegeben werden.
6) Transformation von Netzentwürfen: Die Transformation von Netzentwürfen ist ein Verfahren zur Verbesserung der Eigenschaften von Kartennetzen und damit von Karteninhalten mit klassischen und modernen Methoden.
Bei der Konstruktion von Mischkarten werden Abbildungsgleichungen von Netzentwürfen miteinander
kombiniert, um günstige Verzerrungseigenschaften einzelner Entwürfe in einem neuen Entwurf zur
Auswirkung zu bringen und ungünstige zu unterdrücken. Dabei werden in der Regel vermittelnde
Eigenschaften in Kauf genommen. Beispiele von Mischkarten sind Breusings vermittelnder Entwurf
(azimutaler Kartennetzentwurf) sowie die Gruppe der Eckertschen und der Winkelschen Entwürfe
(unechte Zylinderentwürfe). Die Konstruktion solcher Mischkarten gehört zu den klassischen
Netztransformationen wie auch das Umbeziffern eines Netzentwurfes. Für letzteres dienen als
Beispiele Aïtow-Hammers flächentreuer Entwurf und der modifizierte Entwurf VII nach Wagner. Die
beiden letztgenannten Entwürfe bleiben bei geeigneter Wahl von Stauchungs- und Dehnungsfaktoren
flächentreu. Eine rein rechnerische Netztransformation von geographischen Koordinaten für die Fälle nicht-polarer
Lage der Kegel- oder Zylinderachse bzw. der Tangentialebene bei Azimutalentwürfen in bezug auf
die Erdachse ist unter schiefachsiger Entwurf mit einfachen Transformationsformeln dargestellt. Es
handelt sich dabei um die Berechnung eines kartographischen Netzsystems, bei dem die kartographischen Koordinaten bezüglich des kartographischen Pols (desjenigen Punktes, in dem die Achse der Zwischenabbildungsfigur die Kugel durchstösst), der als Hauptpunkt bezeichnet wird, polar sind. Wenn die Transformation sich nicht auf eine einfache Drehung beschränkt und eine exakte Berechnung nicht möglich ist, werden auch Reihenentwicklungen angesetzt (Gauss-Krüger-Koordinaten).
Für spezielle Fälle meist grossmassstäbiger Karten (z.B. Stadtpläne) wird, je nach der Dichte der darzustellenden Objekte, ein polyfokal verzerrtes Kartennetz angewendet (Abb. 3). Diese anamorphose Darstellungsweise ist der photogrammetrischen Entzerrung verwandt.
Bei Vorhandensein von Datenbanken, die Karteninhalte, aber auch Netzinformationen enthalten, geht die Entwicklung zur Anwendung von Bildübertragungssystemen. Dabei spielt die Datenübertragung wie auch die Datenübernahme aus vorhandenen Karten eine Rolle. Bei der Datenbereitstellung gewinnen die Fernerkundung (Remote Sensing) in Erweiterung der Photogrammetrie und die elektronischen Verfahren der Satelliten- und Raumsondentechnik in letzter Zeit stark an Bedeutung.
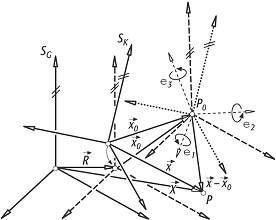 Transformation 1: geometrische Veranschaulichung der allgemeinen Ähnlichkeitstransformation. Transformation 1: geometrische Veranschaulichung der allgemeinen Ähnlichkeitstransformation.
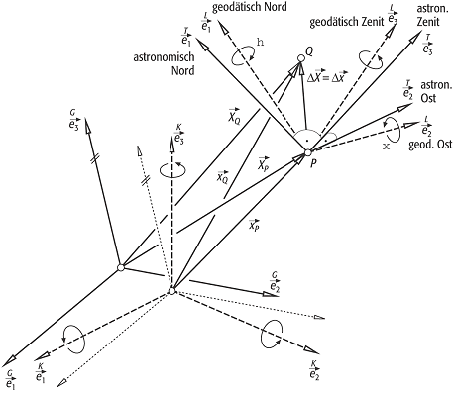 Transformation 2: Transformation zwischen topozentrischem astronomischen und lokalem ellipsoidischen Koordinatensystem. Transformation 2: Transformation zwischen topozentrischem astronomischen und lokalem ellipsoidischen Koordinatensystem.
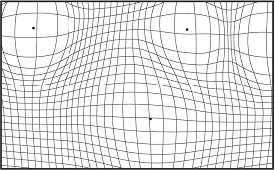 Transformation 3: polyfokal verzerrtes Kartennetz. Transformation 3: polyfokal verzerrtes Kartennetz. |
|
