| |
bei herkömmlichen, abbildenden Radar-Systemen wird jedem Punkt des abgebildeten Gebietes entsprechend seinem Abstand zum Sensor eine Position in der Bildebene zugeordnet. Das Ergebnis ist ein zweidimensionales Bild des Testgebietes. Eine Weiterentwicklung dieser Methode stellt die SAR-Interferometrie dar. Hierbei wird ein Testgebiet von zwei oder mehr unterschiedlichen Sensorpositionen aus abgebildet. Da es sich bei Radarsystemen um kohärente Systeme handelt, enthalten die Daten nicht nur Informationen über die Rückstreuintensität sondern auch eine Phaseninformation. Diese Phaseninformation beziehungsweise die Differenzphase zwischen den beiden Aufnahmen kann zur Erstellung von digitalen Höhenmodellen (across-track Interferometrie), zur Detektion von Veränderungen im Zentimeterbereich (Differential Interferometrie), zur multitemoralen Klassifikation oder zur Detektion beweglicher Streuer (along-track Interferometrie) verwendet werden.
Für interferometrische Anwendungen benötigt man zwei oder mehr Aufnahmen des Testgebietes von leicht unterschiedlichen Sensorpositionen. Dies kann entweder durch einmaliges Befliegen des Testgebietes erreicht werden, wobei sich auf der Sensorplattform zwei räumlich getrennte Antennen befinden (Single-Pass-Mode), oder, bei Sensoren die nur über eine Antenne verfügen, durch wiederholtes Überfliegen des Testgebietes mit leicht gegeneinander versetzten Flugwegen. Die räumliche Distanz zwischen den beiden Antennen wird als Baseline B oder Standline bezeichnet. Je nachdem ob die Antennen einen räumlichen Versatz parallel oder senkrecht zur Flugrichtung der Sensorplattform besitzen, spricht man von along-track oder across-track Interferometrie. Erstere wird hauptsächlich zur Detektion beweglicher Streuer (Moving Target Identification, MTI) verwendet, letztere zur Erstellung digitaler Geländemodelle (DGM) oder zur multitemporalen Klassifikation.
Das interferometrische Prinzip: durch die unterschiedlichen Aufnahmepositionen ist der Abstand eines beliebigen Punktes im Testgebiet zu den beiden Sensorpositionen verschieden. Die zugehörigen zwei Pixel unterscheiden sich daher in ihrer Phasen φA2 und φA1. Die gemessene Phase eines Streuers setzt sich zusammen aus einem Anteil φstreu, der durch den Streuprozess bestimmt wird, sowie einem Anteil φpos der aus der Laufzeit, beziehungsweise der Entfernung, zwischen Streuer und Sensor resultiert:
φi=φstreu+φpos. (1) Für genügend kleine Abstände zwischen den Sensorpositionen kann das Streuverhalten des Streuers für beide Aufnahmen als nahezu identisch angenommen werden. Die Phasendifferenz φinf:
φinf=φA2-φA1=φstreu+φposA2-(φstreu+φposA1)=φposA2-φposA1 (2) resultiert somit nur aus den unterschiedlichen Abständen zwischen dem Streuer und den beiden Antennenpositionen. Diese Phasendifferenz wird als interferometrische Phase bezeichnet. Bei hinreichend genauer Kenntnis der Aufnahmegeometrie kann aus dieser Phasendifferenz mittels einfacher trigonometrischer Gleichungen aus der aufnahmebedingten Geometrie eines Punktes in der Entfernungsebene die Höhe des Punktes über einer Referenzebene berechnet werden. Wird diese Berechnung für jeden Punkt des Testgebietes durchgeführt, erhält man eine Reliefdarstellung des Testgebietes die mittels anschliessender Geokodierung in ein digitales Geländemodell überführt werden kann. Die Phasendifferenz ist allerdings nur in einem Bereich zwischen 0 und 2π eindeutig messbar. Um die daraus resultierende Mehrdeutigkeit aufzulösen ist zur Erstellung von digitalen Geländemodellen ein zusätzlicher Verarbeitungsschritt notwendig, der als Phase-Unwrapping bezeichnet wird. Die gängigen Phase-Unwrapping-Verfahren basieren auf der Integration über den Phasengradienten, der aus der interferometrischen Phase berechnet werden kann.
Wie bereits angesprochen und in der Abbildung dargestellt, benötigt man für die
 Radarinterferometrie (mindestens) zwei Antennen A1 und A2, die, räumlich durch eine Standline getrennt, das Testgebiet abbilden. Die Entfernung zwischen Antenne A2 und einem Streuer am Punkt P auf der Oberfläche beträgt rA2=r, und die Distanz zur zweiten Antenne A1 beträgt rA1=r+Δr. Radarinterferometrie (mindestens) zwei Antennen A1 und A2, die, räumlich durch eine Standline getrennt, das Testgebiet abbilden. Die Entfernung zwischen Antenne A2 und einem Streuer am Punkt P auf der Oberfläche beträgt rA2=r, und die Distanz zur zweiten Antenne A1 beträgt rA1=r+Δr.
Um zu gewährleisten, dass der Streuvorgang für beide Aufnahmen als identisch angenommen werden kann, darf der Abstand zwischen den beiden Antennenpositionen einen bestimmten Wert, die kritische Baseline Bcrit, nicht überschreiten. Die kritische Baseline ist abhängig von der verwendeten Wellenlänge λ, dem Abstand zwischen den Sensoren und dem Streuer r und dem Einfallswinkel θ:
 Für Daten der shuttlegetragenen SIR-C Mission beträgt die kritische Baseline zum Beispiel Bcrit=1,1 Für Daten der shuttlegetragenen SIR-C Mission beträgt die kritische Baseline zum Beispiel Bcrit=1,1
km.
Die Phasen der zwei Aufnahmen φA/A2, gemessen mit den Antennen A1 und A2, betragen dann:
 Subtrahiert man nun φA2, fällt die Phase φstreu weg: Subtrahiert man nun φA2, fällt die Phase φstreu weg:
 Unter Verwendung des Kosinussatzes ergibt sich hieraus: Unter Verwendung des Kosinussatzes ergibt sich hieraus:
 Da für interferometrische Anwendungen in der Regel B <<rA1 gilt, kann die Quadratwurzel in eine Taylorreihe bis zum ersten Term entwickelt werden: Da für interferometrische Anwendungen in der Regel B <<rA1 gilt, kann die Quadratwurzel in eine Taylorreihe bis zum ersten Term entwickelt werden:
 Die Phasendifferenz ist also sowohl von der Aufnahmegeometrie als auch von der Höhe z des Die Phasendifferenz ist also sowohl von der Aufnahmegeometrie als auch von der Höhe z des
Punktes bezüglich einer Referenzebene (h0=0) abhängig. Aus der Abbildung ist ersichtlich, dass gilt:
z(y)=h-r cosθ (9)
Durch Kombination der Gleichungen erhält man die Topographie als Funktion der Observablen:
 Für den Fall, dass die Aufnahmegeometrie hinreichend genau bekannt ist kann also die topographische Höhe z(y) eines Streuers aus den Daten berechnet werden. Die Genauigkeiten liegen hierbei bei einigen Metern für satellitengestützte Anwendungen und im Zentimeterbereich für flugzeuggetragene Sensorsysteme. Für den Fall, dass die Aufnahmegeometrie hinreichend genau bekannt ist kann also die topographische Höhe z(y) eines Streuers aus den Daten berechnet werden. Die Genauigkeiten liegen hierbei bei einigen Metern für satellitengestützte Anwendungen und im Zentimeterbereich für flugzeuggetragene Sensorsysteme.
Für alle oben angestellten Überlegungen wurde die Objektphase des Streuers φstreu für beide Aufnahmen als konstant angenommen und somit die Phasendifferenz als rein geometriebedingt. In der Realität müssen allerdings zusätzliche Effekte berücksichtigt werden, von denen die wichtigsten im Folgenden angesprochen werden sollen: a) Systemrauschen: Für Bereiche geringer Rückstreuintensität ergibt sich ein niedriges Signal–zu–Rausch–Verhältnis (Signal to Noise Ration, SNR), und die gemessene Phase des Streuers ist mit einem statistischen verteilten Rauschanteil überlagert. b) Geometrische Dekorrelation: Durch die leicht unterschiedlichen Aufnahmepositionen werden die Streuer unter leicht unterschiedlichen Winkeln betrachtet, was in einer leicht unterschiedlichen Objektphase φstreu resultiert. Dieser Effekt wächst mit zunehmender Baseline bis hin zur vollständigen Dekorrelation beim Überschreiten der kritischen Baseline. c) Zeitliche Dekorrelation: Für Repeat-pass-Anwendungen können sich die Streueigenschaften innerhalb der Auflösungszelle zwischen den Überflügen ändern und damit auch die Objektphase φstreu. Die ersten beiden Effekte sind technische Probleme und können durch geeignete Gegenmassnahmen kompensiert werden. Der dritte Effekt hingegen basiert auf Veränderungen der Streuer und kann nicht beeinflusst werden. Andererseits kann dieser Effekt zur Detektion von Veränderungen im Testgebiet herangezogen werden und für Klassifikationsanwendungen ausgewertet werden. Die Phasenkorrelation, auch interferometrische Kohärenz γ genannt, ist definiert als der Absolutwert des normalisierten komplexen Korrelationskoeffizienten:
 S1 und S2 bezeichnen hierbei die komplexen Radarbilder und E(...) ist der zeitliche Erwartungswert. Da gewöhnlich nur eine Messung von S1S2* verfügbar ist, muss zur Erwartungswertbildung Ergodizität angenommen werden und der zeitliche durch den räumlichen komplexen Mittelwert SiSj*〉N über N benachbarte Pixel ersetzt werden: S1 und S2 bezeichnen hierbei die komplexen Radarbilder und E(...) ist der zeitliche Erwartungswert. Da gewöhnlich nur eine Messung von S1S2* verfügbar ist, muss zur Erwartungswertbildung Ergodizität angenommen werden und der zeitliche durch den räumlichen komplexen Mittelwert SiSj*〉N über N benachbarte Pixel ersetzt werden:
 Für diesen Ansatz muss angenommen werden, dass benachbarte Pixel den gleichen Mittelwert und die gleiche Standardabweichung besitzen. Nur in diesem Falle gilt: Für diesen Ansatz muss angenommen werden, dass benachbarte Pixel den gleichen Mittelwert und die gleiche Standardabweichung besitzen. Nur in diesem Falle gilt:
 Diese Annahme ist allerdings nicht immer zutreffend. Insbesondere gilt dies für Gebiete mit starkem Relief, in denen die reliefbedingte Phasenänderung die Kohärenz verschlechtert. Durch Verwendung vorhandener Geländemodelle können diese Effekte jedoch beseitigt werden. Diese Annahme ist allerdings nicht immer zutreffend. Insbesondere gilt dies für Gebiete mit starkem Relief, in denen die reliefbedingte Phasenänderung die Kohärenz verschlechtert. Durch Verwendung vorhandener Geländemodelle können diese Effekte jedoch beseitigt werden.
Aus obiger Gleichung ist ersichtlich, dass die möglichen Werte der Kohärenz im Intervall [0,1] liegen. Eine Kohärenz von 0 bezeichnet hierbei eine völlige Dekorrelation und eine Kohärenz von 1 eine vollständige Korrelation der Pixel.
Für Klassifikationsansätze nutzt man die unterschiedliche zeitliche Veränderung im Streuverhalten verschiedener Objekte aus. Künstliche Streuer wie zum Beispiel Gebäude oder Winkelspiegel verändern ihr Streuverhalten im Laufe der Zeit kaum und haben daher in der Regel eine hohe Kohärenz. Vegetation hingegen ändert, abhängig von der verwendeten Wellenlänge, die Streueigenschaften im Laufe der Zeit. Insbesondere für hohe Frequenzen wie im C- und X-Band findet aufgrund der geringen Eindringtiefe der Streuprozess an den Blättern und kleinen Zweigen statt. Diese ändern ihre Geometrie (zum Beispiel durch Wind, Sonnenstand und Wachstum) recht schnell und die Kohärenz sinkt auch schon bei kurzen Zeitabständen zwischen den Aufnahmen. Für niedrigere Frequenzen wie zum Beispiel das L- und P-Band findet der Streuprozess aufgrund der höheren Eindringtiefe hauptsächlich am Boden und an den Stämmen statt, die auch über längere Zeiträume ihre Streugeometrie nicht ändern. Daher weisen Aufnahmen in diesen Frequenzbereichen auch über Vegetationsgebieten eine vergleichsweise hohe Kohärenz auf. Unter Ausnutzung dieser Zusammenhänge und gegebenenfalls Verwendung von Aufnahmen in mehreren Frequenzbereichen lassen sich somit Klassifikationen erstellen.
Falls mehr als zwei zeitlich versetzte Aufnahmen eines Testgebietes verfügbar sind, lassen sich mehrere Interferogramme und daraus entsprechende Höhenmodelle berechnen. Durch Differenzbildung zwischen diesen Höhenmodellen lassen sich differentielle Höhenmodellen berechnen. Diese differentiellen Höhenmodelle enthalten nur Information über die relativen Veränderungen der Topographie zwischen zwei interferometrisch bestimmten Höhenmodellen, die mit einer Genauigkeit im Zentimeterbereich (für Punktzeile sogar bis in den Millimeterbereich) Aussagen über die Änderung der Topographie liefern. Diese Verfahren werden u.a. in der Vulkanologie und für das Monitoring von Gletscherbewegungen eingesetzt.
Weitere Ansätze sind: a) Tomographie: Mittels Interferometrie ist es möglich digitale Geländemodelle zu erstellen. Hierbei handelt es sich allerdings nicht um echte dreidimensionale Resultate. Durch die Verwendung mehrerer Baselines ist es jedoch möglich die Daten in unterschiedlichen Höhen zu fokussieren und somit (analog zur medizinischen Tomographie) echte dreidimensionale Datensätze zu erzeugen. b) Polarimetrische Interferometrie: Konventionelle abbildende Radarsysteme arbeiten in der Regel mit einer Antenne mit einer fixen Polarisation. Verwendet man statt dieser Einantennensysteme vollpolarimetrische Systeme, die über zwei orthogonal polarisierte Antennen verfügen, ist es möglich, nicht nur Aussagen über die räumliche Verteilung der Streumechanismen zu treffen, sondern auch über die Art der Streumechanismen und ebenso die Trennung unterschiedlicher Streumechanismen in der selben Auflösungszelle. Damit lassen sich dann Interferogramme zwischen unterschiedlichen Streumechanismen bilden. Zum Beispiel können so Höhenmodelle der Streuung im Laubdach und Höhenmodelle der Streuung am Boden gewonnen werden und die Differenz der beiden Höhenmodelle ermöglicht eine Abschätzung der Vegetationshöhe.
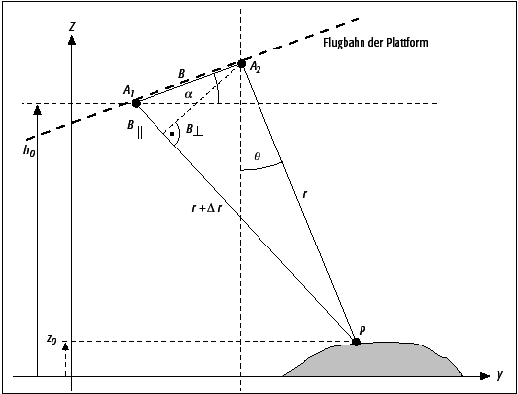 Radar-Interferometrie: Prinzipskizze der Aufnahmegeometrie für Radar-Interferometrie. Radar-Interferometrie: Prinzipskizze der Aufnahmegeometrie für Radar-Interferometrie. |
|
