| |
GPS, satellitengestütztes Radionavigationssystem. GPS wird unter der vollständigen Bezeichnung NAVSTAR-GPS (Navigation System with Time and Ranging) als Nachfolgesystem für TRANSIT unter der Verantwortung des US Verteidigungsministeriums seit Mitte der 1970er Jahre aufgebaut, unterhalten und weiterentwickelt. Für zivile Nutzer ist eine ständige Verfügbarkeit im Rahmen des Standard Positioning Service (SPS) garantiert.
GPS hat sich wegen seiner globalen Einsatzmöglichkeit, Allwettertauglichkeit, einfachen Handhabung und des hohen Genauigkeitspotentials zu dem wichtigsten Verfahren der Positionsbestimmung und Navigation entwickelt. Das Messprinzip ermöglicht einen Einsatz sowohl für feste Beobachtungsaufstellung (statisches GPS) als auch für bewegte Messträger wie Personen, Land-, Wasser-, Luftfahrzeuge und Satelliten (kinematisches GPS).
Die Satellitenkonfiguration (GPS-Raumsegment) besteht nominell aus 24 Satelliten in einer Bahnhöhe von 20.200 km, und ist so gestaltet, dass von jedem Punkt der Erde aus gesehen jederzeit mindestens vier Satelliten über dem Horizont stehen (Abb. 1 u. 2). Das Navigationsprinzip beruht auf der gleichzeitigen Messung sog. Pseudoentfernungen zwischen mindestens vier Satelliten und einem GPS-Empfänger auf der Nutzerseite. Dazu senden die Satelliten auf zwei Trägerfrequenzen (L1 = 1,57 GHz; L2 = 1,23 GHz) codierte Signale (P-Code, C/A-Code) sowie die vom Kontrollsegment bestimmten Broadcastephemeriden zur Berechnung der Satellitenpositionen aus. Aus den jeweiligen Satellitenpositionen und den aus der Laufzeitmessung durch Multiplikation mit der Ausbreitungsgeschwindigkeit ermittelten Pseudoentfernungen wird empfängerintern in Echtzeit oder durch nachträgliche Bearbeitung der aufgezeichneten Daten (Postprocessing), ggf. gemeinsam mit den Daten anderer Beobachtungsstationen (GPS-Mehrstationslösung), die Nutzerposition berechnet.
GPS-Ergebnisse sind dreidimensionale, kartesische oder ellipsoidische geozentrische Koordinaten im globalen Bezugssystem WGS84, die über geeignete Transformationsformeln in lokale Koordinaten umgewandelt werden können (Datumstransformation). Je nach Messanordnung, Satellitenkonfiguration (dilution of precision), Signalnutzung und Fehlermodellierung lassen sich sehr unterschiedliche Genauigkeiten erzielen (Tab.). Wesentliche Fehlerquellen beim GPS sind die verfügbaren Bahninformationen und die GPS-Signalausbreitung in der Atmosphäre (Troposphäre, Ionosphäre) sowie in der Antennenumgebung (Multipath). Hinzu kommen die aus militärischen Gründen eingeführten GPS-Sicherungsmassnahmen zur Signalverschlechterung (Selective Availability (SA), anti-spoofing). Mit einem einzelnen Empfänger (GPS-Einzelpunktbestimmung) wird für zivile Nutzer im Rahmen des Standard Positioning Service (SPS) lediglich eine Genauigkeit von etwa 100 m garantiert. Seit Abschalten von SA am 1. Mai 2000 ist die erzielbare Genauigkeit für zivile Nutzer mit Zweifrequenzsystem besser als 15 m. Durch Relativmessungen zu bestehenden oder gesondert eingerichteten GPS-Referenzstationen lässt sich ein bedeutender Anteil der wirksamen Fehler durch Differenzbildung der Beobachtungsgrössen eliminieren (Differential-GPS, DGPS). In Deutschland haben die Landesvermessungsverwaltungen dazu den Dienst SAPOS in unterschiedlichen Genauigkeitsklassen aufgebaut. Standardmässig wird mit DGPS bei Nutzung der Codes eine Genauigkeit von 2 bis 5 m erzielt, bei trägergeglätteten Codemessungen auf der Nutzerseite 0,5 bis 1 m. Bei Verwendung der Trägerphasen (GPS-Beobachtungsgrössen) lässt sich eine Genauigkeit von wenigen cm erreichen. Voraussetzung dazu ist die Lösung der Phasenmehrdeutigkeiten, d.h. der vollen Anzahl von Wellenzügen (ca. 20 cm Wellenlänge) zwischen Satellit und Empfänger. Über kurze Entfernungen (bis zu 10 km von den Referenzstationen) lassen sich Mehrdeutigkeiten durch Suchalgorithmen bereits nach wenigen Sekunden Messdauer lösen. Typische Anwendungen finden sich z.B. im Geoinformations- und im Vermessungswesen. Die Industrie stellt hierzu echtzeitfähige Gerätekonfigurationen zur Verfügung (Echtzeitkinematik, RTK). Bei grösseren Entfernungen und hohen Genauigkeitsansprüchen sind Beobachtungszeiten von mehreren Stunden bis Tagen erforderlich. Dies gilt insbesondere für die Anlage globaler, kontinentaler oder nationaler Kontrollnetze (z.B. ITRF, EUREF, SIRGAS) sowie für die Überwachung von rezenten Krustenbewegungen (z.B. Plattentektonik, Erdbeben, Vulkanismus) oder der Erdrotationsparameter. Hierbei ist es üblich, in Netzen mit mehr als zwei simultan arbeitenden Empfängern zu beobachten (GPS-Mehrstationslösung).
In der russischen Föderation (früher in der UdSSR) wird ein vergleichbares Satellitensystem unter der Bezeichnung GLONASS aufgebaut und betrieben. Die gleichzeitige Nutzung beider Satellitensysteme ist mit kombinierten GPS/GLONASS Empfängern möglich.
GSe
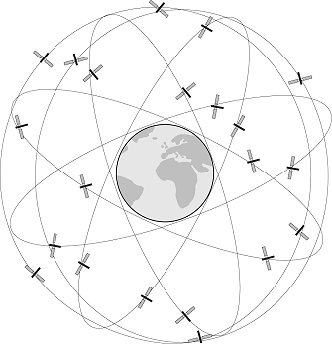 Global Positioning System 1: NAVSTAR Global Positiong System (GPS). 24 Satelliten sind in ca. 20.000 km Höhe angeordnet. Global Positioning System 1: NAVSTAR Global Positiong System (GPS). 24 Satelliten sind in ca. 20.000 km Höhe angeordnet.
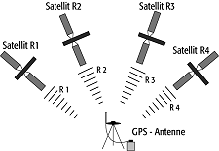 Global Positioning System 2: Messprinzip beim GPS: aus gleichzeitiger Entfernungsmessung zu vier Satelliten wird die 3D-Nutzerposition und eine Uhrkorrektur bestimmt. Global Positioning System 2: Messprinzip beim GPS: aus gleichzeitiger Entfernungsmessung zu vier Satelliten wird die 3D-Nutzerposition und eine Uhrkorrektur bestimmt.
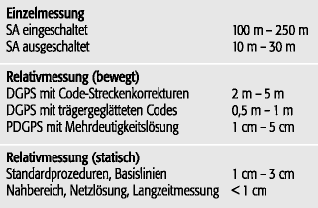 Global Positioning System (Tab.): erzielbare Genauigkeit beim GPS (Übersicht). Global Positioning System (Tab.): erzielbare Genauigkeit beim GPS (Übersicht). |
|
